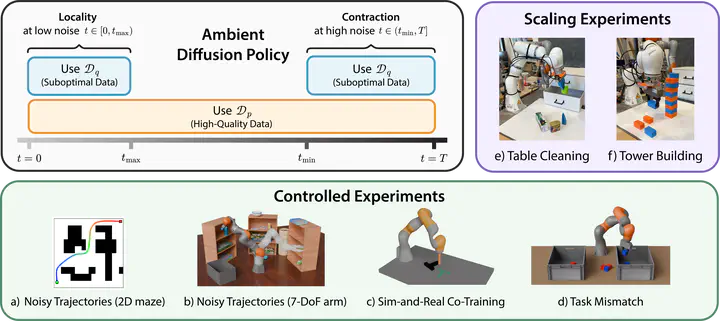
Ambient Diffusion Policy: Imitation Learning from Suboptimal Data in Robotics
Adam Wei
EECS Ph.D. Candidate
Robotics PhD student at MIT CSAIL. I am interested in robotics, imitation learning, generative modeling, and controls.
Robotics PhD student at MIT CSAIL. I am interested in robotics, imitation learning, generative modeling, and controls.